
Automatic Toe-Linking Device
Automatic Toe-Linking Device is very important part of automatic linking sock knitting machine, which move the lower stitch loop to the linking teeth of the linking plate, flip the knitted socks into the sock transferring tube, and then move them to the linking position through the sock moving mechanism to linking the sock toe. This process is called sock transferring. And the linking way is use one stitch by stitch.
Automatic Toe-Linking Device
The Automatic Toe-Linking Device is the last process in the sock knitting process of the integrated sock machine. The sock blank must pass through the automatic toe-linking device before it can become a sock. Originally this process was performed on a sewing machine, but now it can be automatically linked on a sock machine. However, the quality of the sock toe stitching directly affects the appearance and quality of the socks, so this process is also one of the important processes in the sock knitting process. The requirement for the sock toe stitching is that it must be elastic enough to prevent the garment from breaking due to the tightening of the sutures. It also needs to be soft so that it is comfortable to wear without affecting its appearance. The elastic seam has the above advantages. Therefore, double-thread elastic seams are commonly used on socks. This kind of elastic seam is also used on the integrated sock machine. This kind of elastic seam is formed by the linking loops formed by the upper thread and the lower thread passing through each other.
Automatic Toe-Linking Device
Sock Transferring of Automatic Toe-Linking Device
After the last section of the sock is knitted, the sock knitting machine head rises and the transfer plate starts to work. The stepper motor is driven into the knitting area and the inner transfer plate is aligned with the axis of the sock needle cylinder. All yarn feeders are out of work, the first looping triple focus is entered in stages, and the needle press cam, elastic needle press cam and sock yarn bending cam are out of work. As the sock needle cylinder rotates, the knitting needle rises to the first height along the back of the first looping triangle; when the sock needle cylinder rotates to the next rotation, the first looping triangle is driven in step by step, and the sock knitting needle rises along its back to the second height; Finally, the sock heel triangle is driven in in stages, and the sock knitting needle rises to the loop transfer height. The figure shows the different height positions of the sock knitting needle and the sock knitting needle trajectory during the sock knitting process.
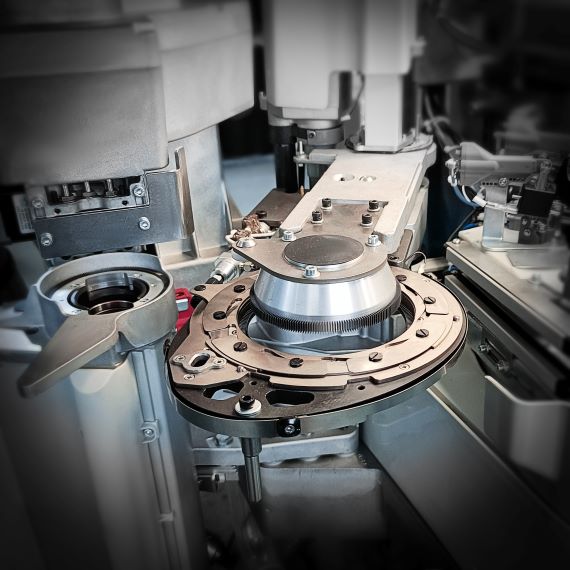
Transfer Plate of Automatic Toe-Linking Device
After the sock knitting machine head rises, the air flow pulling system blows up the sock toe, and the loop is in a relaxed state. Under the action of the triangle, the sock knitting needle rises along its back to the height of the transfer loop, as shown in the picture of the transfer plate and the cylinder cooperates with the positioning rod and the cylinder to perform hole-to-hole matching to control the positioning of the transfer plate.


Sock Transferring 1st Process of Automatic Toe-Linking Device
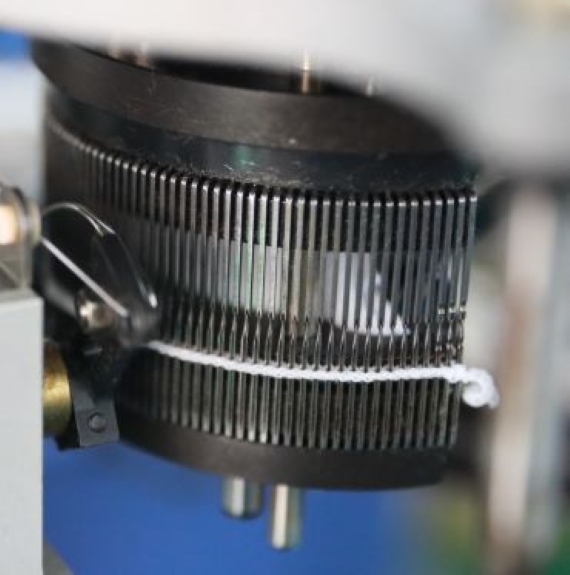
After the sock transfer plate drops to a certain height, the sock transfer plate separates, the upper transfer plate rises, and the lower transfer plate continues to fall. When it passes the syringe sensing point, the lower transfer plate stops falling. At this time, the signal rod pushes the positioning hole to rotate inward, and drives the inner disk to rotate by transferring the lower disk groove. Since the groove of the transfer tooth is covered with an elastic ring, the interior of the dial shrinks. Driven by the elastic force of the rubber band, the transfer tooth also follows the inward contraction, the sock transfer tooth groove is located 1mm below the sock knitting needle, and the loop is located at the sock knitting needle hook as shown in the figure.
Sock Transferring 2nd Process of Automatic Toe-Linking Device
Through the suction mode of the air flow pulling system of the sock machine, the socks are in a tight state and move downward along the sock needle cylinder, and the loop is simultaneously hooked by the hook needle of the lower plate of the transfer; the upper plate of the transfer is lowered, using its own weight and through the transfer, the upper teeth transfer all the stitches to the crochet needle, and complete the transfer of the stitches from the sock knitting needle to the crochet stitch on the transfer plate, as shown in the picture. After the loops are transferred from the knitting needles to the transfer plate inside the sock needle cylinder, the transfer plate rises, and the sock knitting needles descend to the knitting height under the action of the needle cam to re-knit. The transfer plate rotates to the seam head area driven by the stepper motor. When the sock transfer plate rotates to the seam head needle plate sensor, the upper transfer plate stops moving, and the lower transfer plate continues to rotate until it is aligned with the axis of the sock turning tube. The sock turning system goes downward, and the airflow pulling system sucks the knitted socks under the sock-turning device in a suction manner, completing the first transfer of the loop from the knitting needles to the transfer plate.


Second Loop Transfer of Automatic Toe-Linking Device
During the second loop transfer process, the sock turning over system, bottom plate transfer and suture system need to work closely together. The stitching of the sock toe is mainly divided into the transfer of the loop from the transfer plate to the sock turning mechanism and the transfer of the loop from the sock turning mechanism to the seam head mechanism, and then the stitching of the sock toe is completed by a linking machine. Move the lower plate to align with the axis of the inner tube of the sock-turning device, and the socks have been sucked into the inner tube. When the socks are sucked into the inner tube of the sock-turning device, the signal rod of the transfer plate moves outward, and then the transfer plate drives the groove to expand outward. The screw on the middle ring of the lower plate drives the ring to move outward, and then the transfer teeth move outward. shrink. The transfer lower plate continues to rise, and the suture needle plate positioning rod enters the transfer plate hole. When it drops to the specified height, the transfer lower plate stops rising. The signal rod retracts and the transfer disk signal rod rotates, moving the transfer hook needle radially toward the transfer disk needle cylinder.
Finish Linking Sock of Automatic Toe-Linking Device
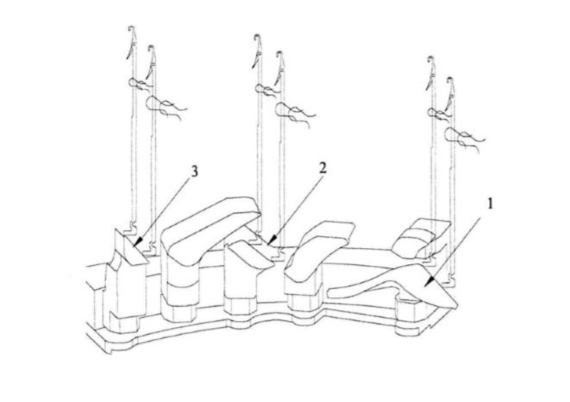
The sock-turning tube rises, the sock is turned over, and the sock-turning tube is fixed in the sock holder on the automatic toe-linking head of the sock needle cylinder. The sock-turning device rises and transfers the loop from the transfer tooth to the suture needle through the sock-turning teeth, realizing the second transfer of the loop, that is, the transfer of the transfer plate to the suture needle. At this time, all the loops are transferred to the suture needle, and The sock toe-linking needle plate passes through the intermediate shaft, flips the outer half of the seam barb 1800 to connect with the upper half of the seam barb one-to-one, and uses the sock pressing plate of the toe-linking needle plate to press the sock toe loop to make final preparations for the seam head.
The needles of the toe-linking machine are partially driven in. One of the needles is inserted into the loop and aligned with the seam barb. The automatic toe-linking machine starts to automatically link the sock toe. The seam head stitches are linked with hemming chain stitches, its toe-linking principle is similar to that of an ordinary sewing machine. The two toe-linking needles in the toe-linking machine are used to link alternately until the seam is completed. The scissors of the toe-linking machine come into work, cut the thread ends, suck the socks into the bell mouth through the suction system, and complete the knitting of socks.