

Sock Knitting Machine Technical Support
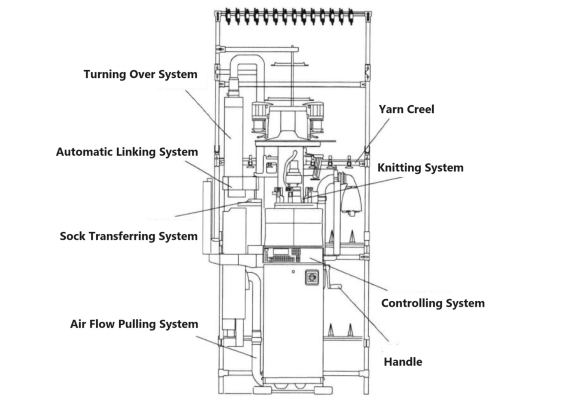
LEEFU computer integrated sock knitting machine is an intelligent automatic toe-linking computerized sock knitting machine with a high degree of automation. It improves the sock forming and knitting method on the basis of the original computerized sock knitting machine and adds an automatic transfer and stitch by stitch linking mechanism. With the help of special knitting needles, sinkers, and transfer needles, the knitted sock blanks are automatically transferred to the stitch by stitch linking mechanism. Automatic stitching, realizing “one-step (seamless) forming method” knitting. The computer integrated sock knitting machine is mainly composed of a computer control system, a knitting system, a transfer mechanism, an automatic sock turning over mechanism, an automatic stitch by stitch linking mechanism, and an air flow pulling system.
Needle Selector Combination Action List
- Technical Data
| Needle Selector | T1 | T2 | T3 | Needle Selector | T1 | T2 | T3 |
| PB | OFF+sel | OFF | OFF | PSX | OFF | ON | OFF |
| PBX | OFF+sel | ON | OFF | PTX | OFF | ON | OFF+sel |
| PN | ON | ON | ON | PTT | OFF+sel | ON | ON |
| PSA | OFF | OFF | OFF | PTN | OFF | ON | ON |
| PSJ | OFF | OFF+sel | OFF | PT | OFF | OFF+sel | ON |
Sock Knitting Machine Technical Support
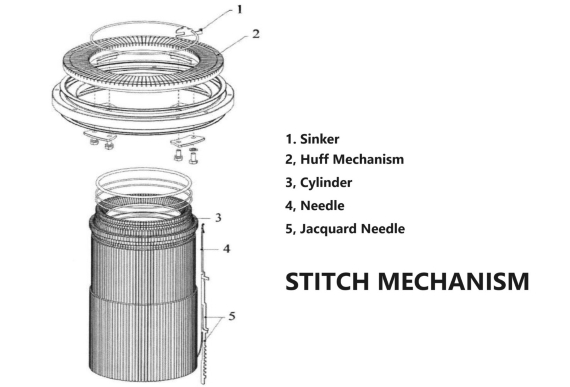
Stitch Mechanism of Sock Knitting Machine
The Stitch Mechanism is mainly composed of knitting needles, sinkers, and a cam system.
- Knitting needles: The knitting needles of the sock knitting machine are arranged according to the sock top needle and the sock bottom needle, which each occupy 180° in the knitting cylinder mechanism. During knitting, the different heights of the needle heels are used to move needles on the triangle to complete knitting in different parts.
- Sinker: The sinker is mainly used to hold the loop and stretch it to the required loop length. Different height sinkers can knit different patterns.
- Triangle system: When each triangle enters the working state, the knitting needle rises along its slope to hook up the yarn, and knits loops, tucks, and floats. Each knitting section of socks needs the cooperation of the triangle system to complete.
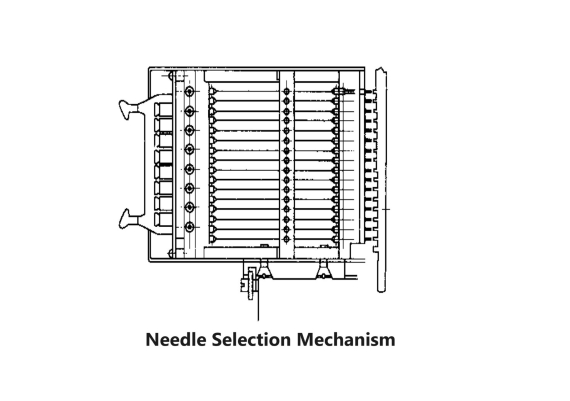
Needle Selection Mechanism And Principle
This sock knitting machine adopts 4-way yarn feeding system. Each channel has three electronic needle selection devices. Each electronic needle selection device has 16 electromagnetic needle selection knives. Each needle selection blade is controlled by a pair of steady-state electromagnetic devices and can be moved to high and low positions.
Each electronic needle selection device has two states: ON and OFF. When the electronic needle selection device is in the ON state, indicating that the needle selection blade presses the corresponding jacquard piece into the needle groove so that the knitting needles on the jacquard piece are not selected and the yarn is not padded into loops. In addition; needle selection can also be performed on every other needle, that is, the needle selection device selects according to a certain rule. Needles, the commonly used ones are 1X1, 1X3, and 3X1 needle selection. Therefore, there are ten kinds of combined actions of three needle selection devices (T1, T2, T3) in each channel.
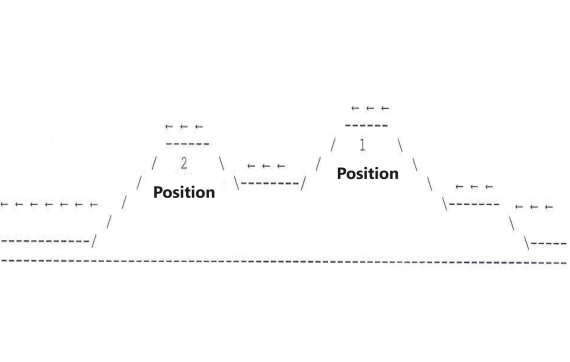
Needle Track of Sock Knitting Machine
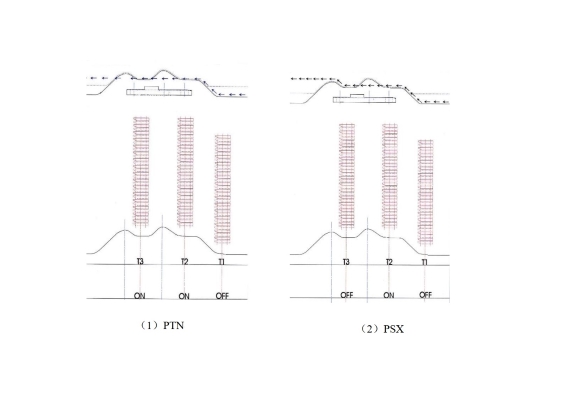
The three needle selectors select needles respectively and control the knitting needle trajectory. In addition to the stitching and tuck heights, there are two stitching heights, namely Position 1 and Position 2. It can be seen from the needle trajectories corresponding to the three needle selection devices in the figure that the T1 needle selection device controls whether the knitting needle reaches the tuck height; the T2 needle selection device controls whether the knitting needle reaches position 1 to form a loop; the T3 needle selection device controls whether the knitting needle reaches position 1 to form a loop; Whether the needle reaches position 2 to form a loop.
Needle Track of Selection Combination
- PTN state, at this time T1 is in the OFF state, that is, the knitting needle is not affected and rises along the triangle to the height of the tuck. T2 is in the ON state, the knitting needle is not selected, maintains the original height, and cannot rise to position 1, that is, it cannot form a loop. When T3 is in the ON state, the knitting needle is also unselected and maintains its original height, and cannot rise to position 2 for knitting. The knitting needles knit the tuck weave along this path.
- PSX state, at this time T1 is in the OFF state, that is, the knitting needle is not affected and rises along the triangle to the height of the tuck. When T2 is in the ON state, the knitting needle is not selected and cannot be raised to the height of position 1 for knitting. T3 is in the OFF state, the knitting needle is selected, continues to rise along the triangle to the height of position 2, and the yarn is laid into a loop. Therefore, the knitting needle can lay yarn in this way to form a loop.
Huff Mechanism of Sock Knitting Machine
The Huff mechanism is the stitching device of the sock knitting machine when knitting double-layer socks. It is mainly composed of the Huff needle plate, the Huff needle, and the Huff needle cam. The Huff needle plate and the needle cylinder rotate concentrically and synchronously, and the Huff needle is inserted into the needle groove. The configuration of Huff needles is the same as that of knitting needles, and the number of Hough needles is half of the number of knitting needles. That is, the Hough needles on the sock are arranged every other on top of the sock needles, and the Hough needles on the bottom of the sock are arranged every other on the sock. Above the bottom needle. There are push-out triangles and blocking triangles in the Huff triangle base, so that the Huff needle can move radially in the Huff disc. The push-out cam is also called the stitching knife. When stitching, the Huff needle is moved out to hook up the yarn. The entry cam is also called the stitching knife. When stitching is transferred, the loops on the Huff needle are transferred to the knitting.
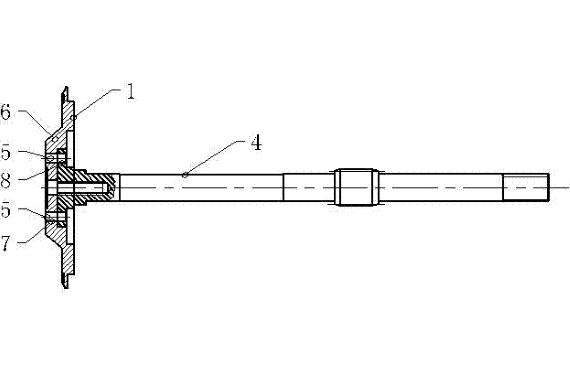
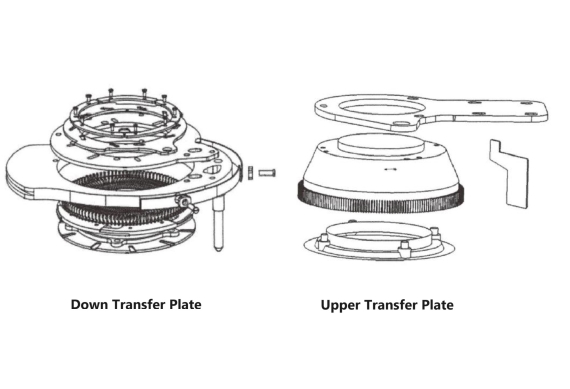
Transferring Mechanism of Toe-linking
The transferring mechanism of the sock knitting machine is located between the sock knitting mechanism and the sock turning mechanism. It transfers the socks that have been formed and knitted in the knitting system to the automatic toe-linking mechanism. It consists of an upper transfer plate and a lower transfer plate. The transfer upper plate includes an upper transfer arm, an upper transfer needle plate, an upper transfer tooth, and a fixed upper plate. The transfer lower plate includes a fixed plate, a push plate, a transfer tooth and a transfer tooth plate.
Sock Transfer Process of Toe-linking
During the sock transfer process, the thimble triangle lifts all the knitting needles at three equal heights. The transfer plate is transferred above the needle cylinder and is concentric with the needle cylinder. The transfer lower plate is aligned with the needle cylinder through fine adjustment of the gear. The transfer lower plate is lowered and aligned with the knitting needle. The needles are engaged, the transfer lower plate is tightened, and the transfer needle is opposite to the knitting needle, and is located under the latch of the knitting needle.
At this time, the air flow pulling system sucks the knitted socks into the needle barrel through suction air, and the loop slides into the transfer needle hook. Lower the upper transfer plate and transfer all the loop to the hook needle of the lower transfer plate again. After the loop transfer is completed, the transfer plate rises. When the socks are grabbed and moved to the initial position, the upper transfer plate rises, and the lower transfer plate continues to move toward the sock turning mechanism. When the loop is transferred from the knitting needle to the transfer mechanism, the needle cylinder is aligned with the axis of the transfer plate, and the loop on the knitting needle is transferred to the transfer tooth, completing the first transfer of the loop.
Automatic Toe-linking Mechanism of Sock Knitting Machine
The loop of socks is transferred to the stitch by stitch mechanism to achieve one-step (seamless) knitting. It is the final stage of the sock knitting process. The automatic toe-linking will directly affect the knitting performance of the product. The stitch by stitch mechanism mainly includes the sock turning mechanism and the automatic toe-linking head mechanism. The sock-turning mechanism is a transition mechanism from the transfer mechanism to the toe-linking head mechanism of knitting socks and prepares for the second transfer of the loops from the transfer plate to the automatic toe-linking mechanism.
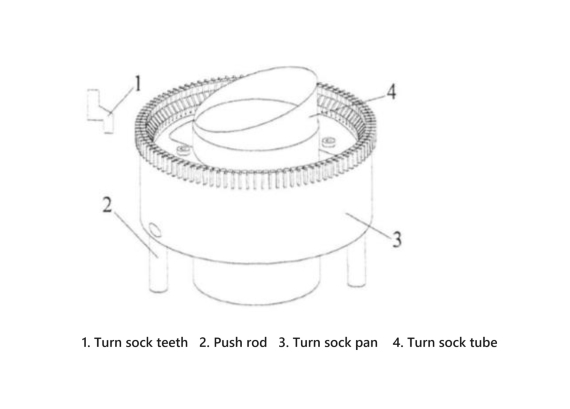
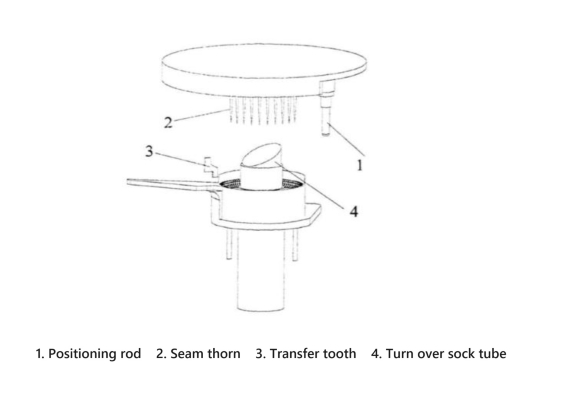
Automatic Toe-linking Process of Sock Knitting Machine
The sock is transferred to the automatic toe-linking head mechanism through the sock turning mechanism to complete the automatic toe-linking of the sock toe. During the sock toe-linking process, the stitches are aligned by rotating the needle disk to complete the sock toe-linking. The toe-linking head mechanism mainly includes a toe-linking needle, a toe-linking needle disk, a positioning rod and a needle group bracket. The toe-linking needle disk can be divided into upper and lower parts through pulleys.